Tight-rope Robotic Arm Model
Initial Design
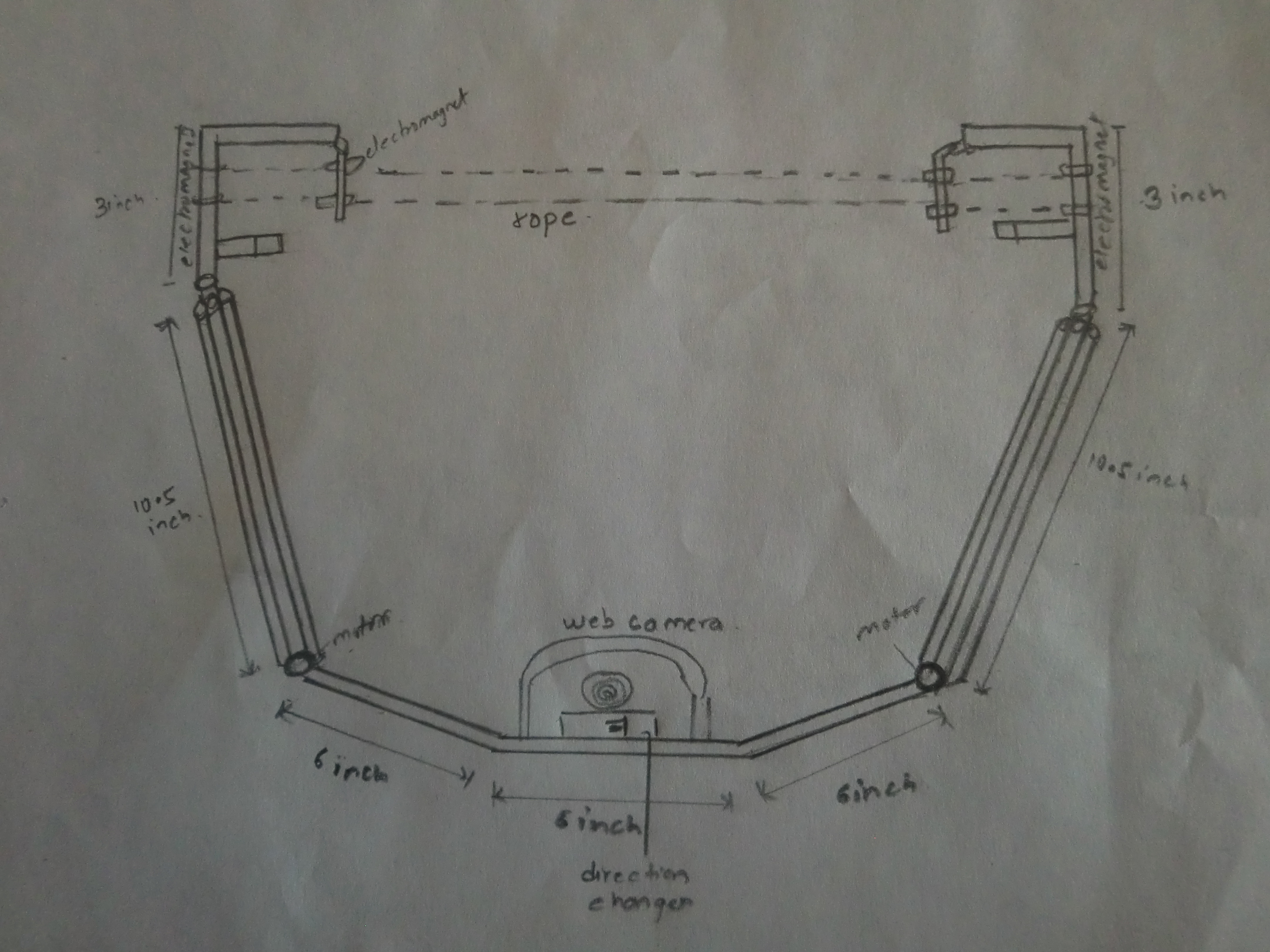
Initial design of Omega TRAM
Properties
- Simple in design as it is planar robot with only two degree of freedom
- Use of electromagnet for grasping by fingers
- Use of motor to produce lift
- Use of single current reverser switch to control the motion of the robot
- Use of Aluminum due to its characteristic of light weight
- Easy to demonstrate
- The electromagnet was not strong as it was expected.
- High rpm motors were unable to lift the Aluminum body
- Use of screw garbing mechanisms instead of electromagnet
- Use of low rpm motors