Tight-rope Robotic Arm Model
Problems encountered and their solution
- Creation of same length hand

creation of same length of upper arm, lower arm, palm, angle of bending between lower arm and shoulder
Solution
- cutting of same length of aluminum bar
- bending of aluminum bar by same degree on both sides
- rotation of motor along with screw
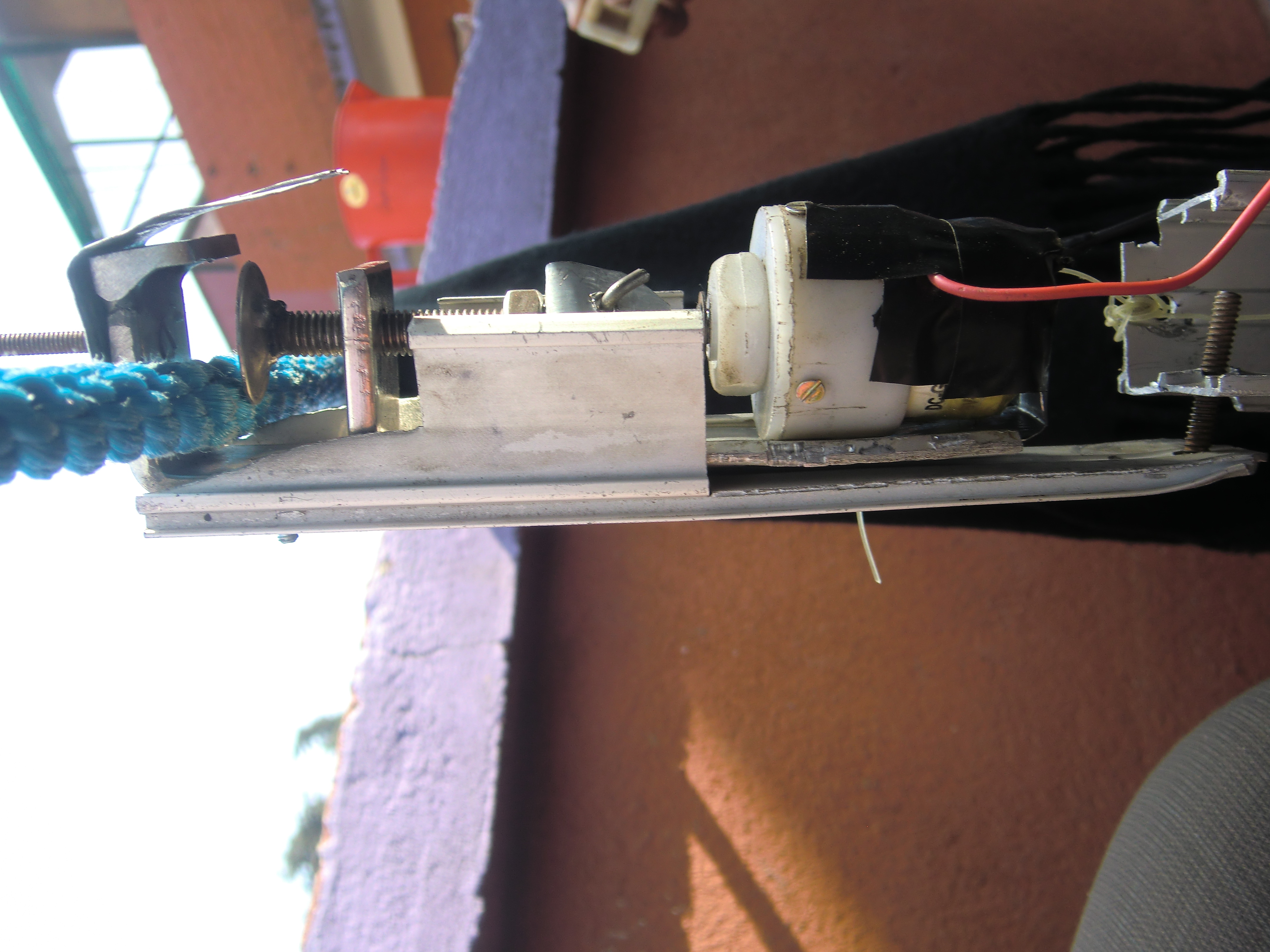
use of sliding tin in aluminum (prismatic joint) and use of hook like structure
Solution
- use of sliding tin attached to motor which restricts rotation of motor but enable it to move up and down
- lack of proper grasping on rope and falling of OMEGA TRAM
Solution
- use of small hook like structure in hand to increase the robots stability in rope
- breaking of rope
Solution
- use of pulley to increase torque by increasing value of sin theta
- use of rope with ability to bear high tension

use of pulley and strong rope